遥感大数据智能挖掘与应用服务关键技术研究
2022.05 - 2025.07
贵州省科技重大专项计划项目
随着我省乡村振兴、大数据、大生态三大战略的深入实施,遥感影像数据在自动化处理、智能解译、行业应用与服 务等方面,不能很好的满足我省经济社会发展的迫切需求。因此,要充分研究复杂地形地貌条件下遥感数据统筹、 多时相自动化处理、大数据共享交换、海量AI样本库、多模态智能解译等遥感、大数据、人工智能方面的交叉前沿 技术,构建星空地一体、省市县贯通的遥感数据快进快出快用平台,形成上下贯通、左右衔接、整体联动、多网协 同、省市统筹、辐射全域的贯通式卫星应用技术和服务体系,满足自然资源、生态环境、农业农村、住房建设、灾 害应急等领域强烈的遥感应用需求,进一步促进我省地理信息和遥感卫星新业态的形成与发展。 本项目围绕贯通式卫星应用技术和服务体系的建设,研究遥感数据生产过程中的采集需求整合、数据统筹获取推送 、影像快速自动化处理、遥感大数据管理和共享交换等关键技术,研究大数据应用支撑范畴内的海量AI样本库建设 、遥感智能解译和网格化监测等关键技术,研究遥感大数据在我省生态环境的监测评估、自然灾害的监测评估、自 然资源的监测统计和资产价值评估等应用领域中的关键技术。 项目由贵州图智信息技术有限公司牵头组织,依托武汉大学、贵州省自然资源卫星应用技术中心和自然资源部国 土卫星遥感应用中心,发挥贵州师范大学、贵州省地质灾害应急技术指导中心、贵州省自然资源勘测规划研究院和 贵阳市自然资源卫星应用技术中心等单位的人才优势、科研优势、专业优势和本地化优势,融合我省遥感卫星产业 生态,构建“科研+生产+应用+服务”的协作体系,能够有力的打通科技成果转化最后一公里。
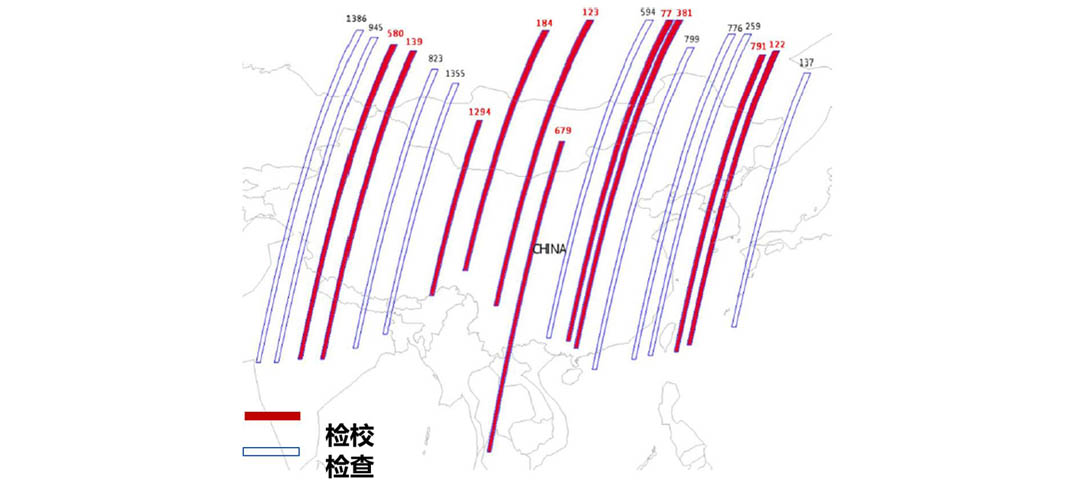
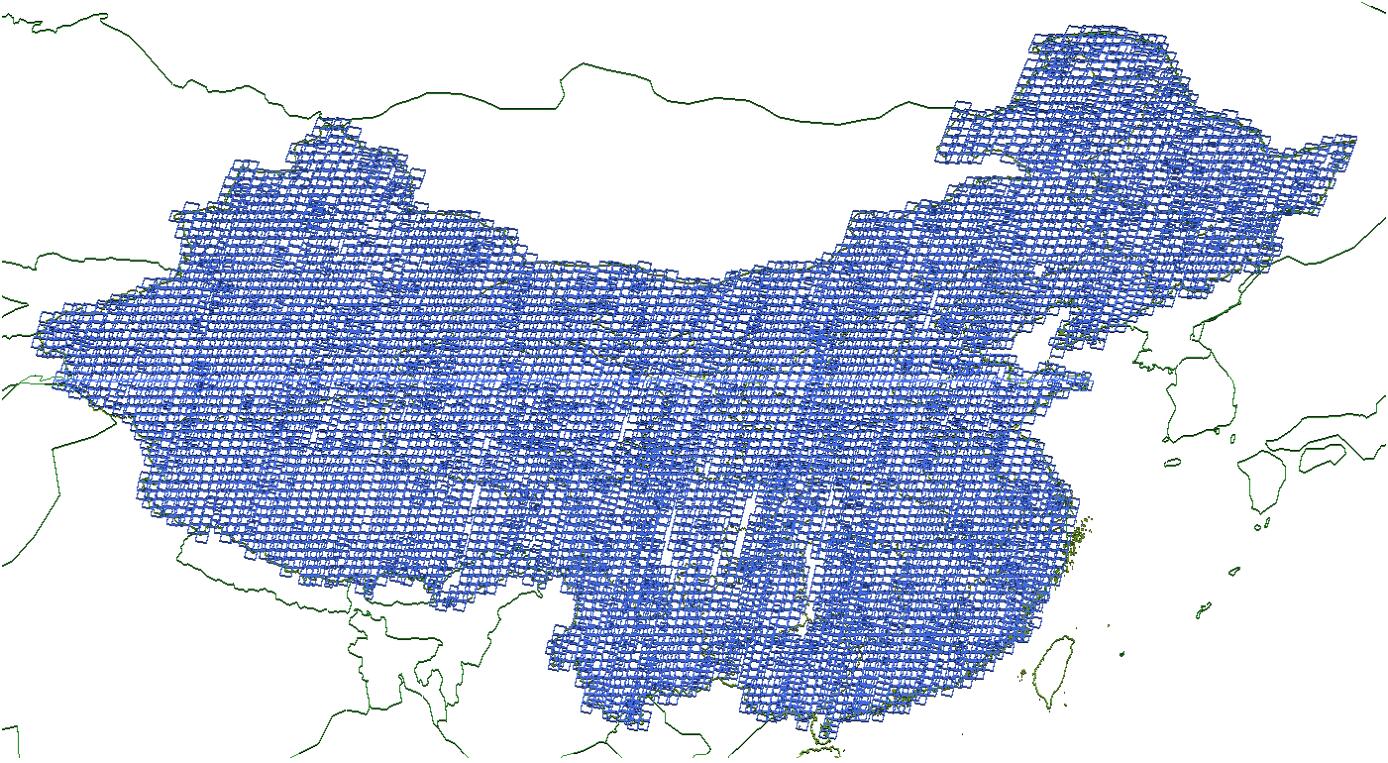
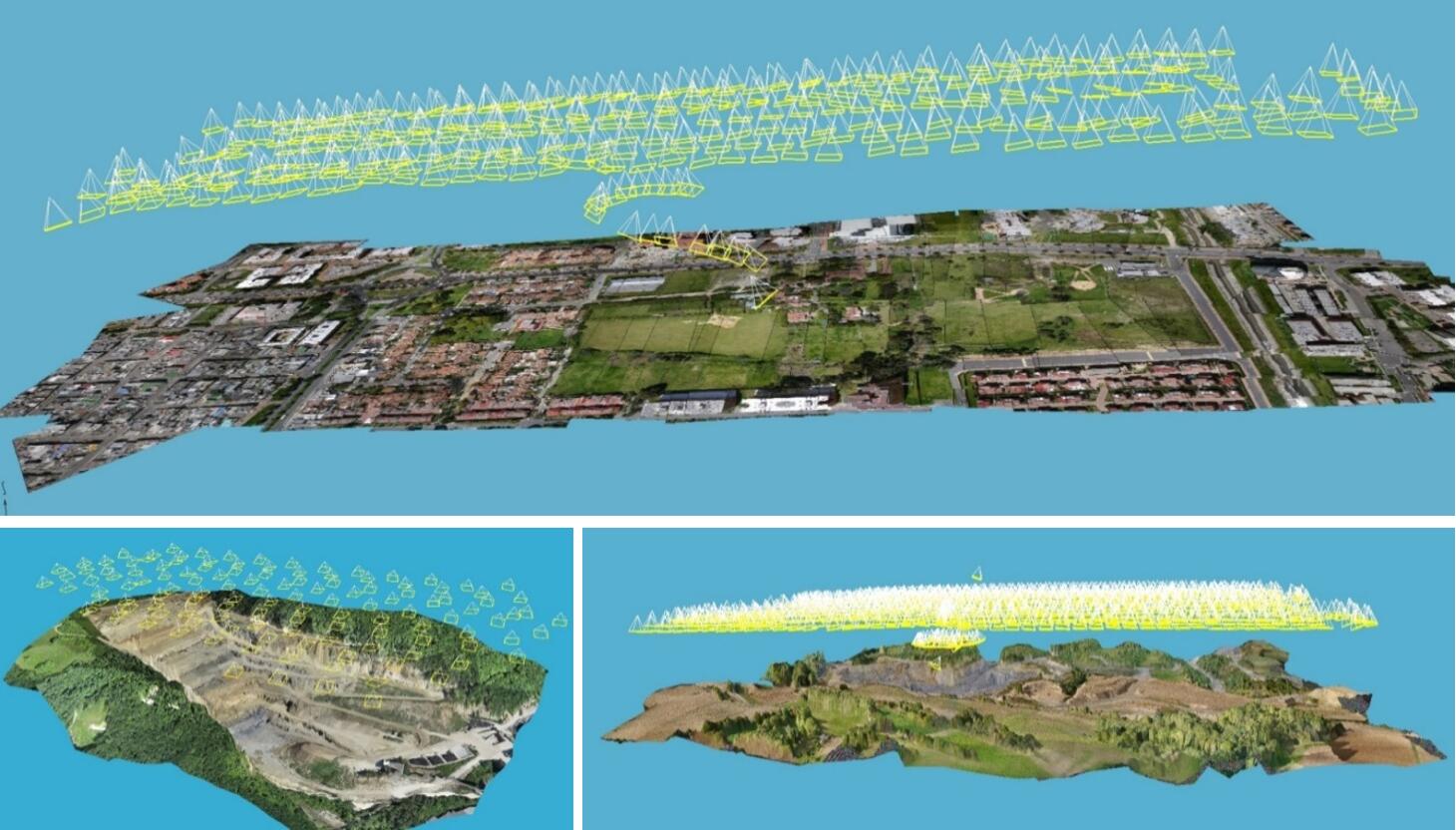
超大范围多源遥感卫星影像联合智能处理与地物信息提取理论方法
2021.01 - 2025.12
国家自然科学基金重点项目 42030102
卫星遥感具有实时性强、覆盖范围广、信息量丰富等优势,但是遥感信息的生产和服务能 力严重滞后,多源遥感卫星影像联合处理应用是地球系统观测和多源数据融合的核心科学问题 。针对遥感对地观测领域的世界科技前沿热点和国家重大工程的迫切需求,立足二十年多源遥 感影像多特征一体化处理研究积累,提出超大范围多源遥感卫星影像联合智能处理与地物信息 提取理论方法的创新研究设想。重点围绕多模态遥感卫星影像高可靠性匹配、多星多载荷一体 化联合在轨几何检校、混合区域网平差、多时相影像合成、基于深度学习的地物信息智能提取 及全链路不确定性分析等前沿科学问题展开理论探索和算法研究,形成“理论架构-联合处理 -信息提取-不确定性分析”有机整合的研究范式,充分发挥每颗卫星、每个波段、每个有效 像元的作用,以期突破美国新一轮遥感领域技术封锁,为全球地理信息资源建设、一带一路倡 议、突发灾害应急响应、自然资源监测等重大工程提供国际一流技术支撑。
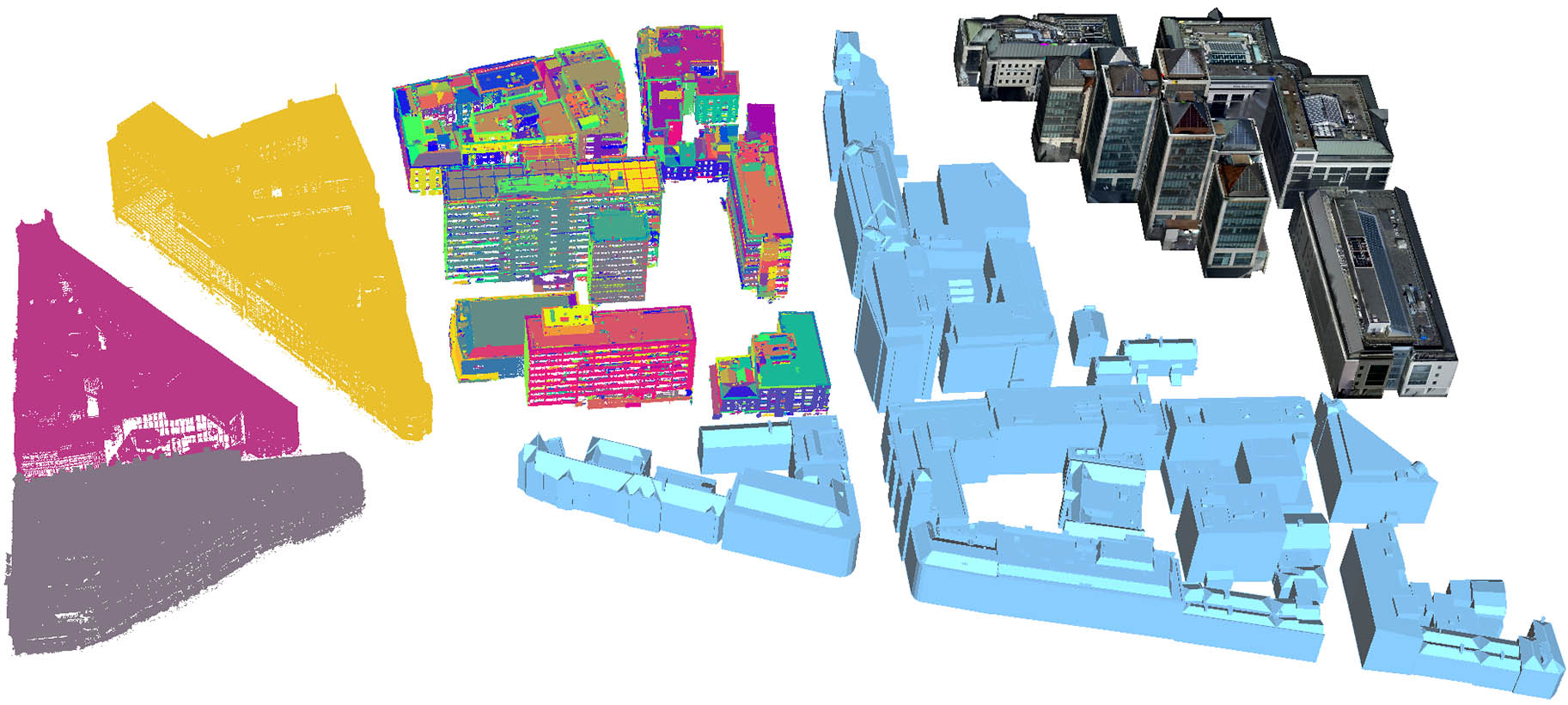
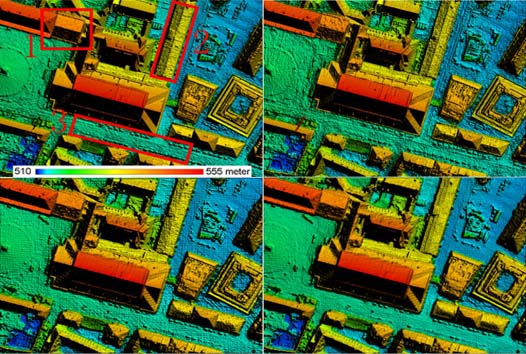
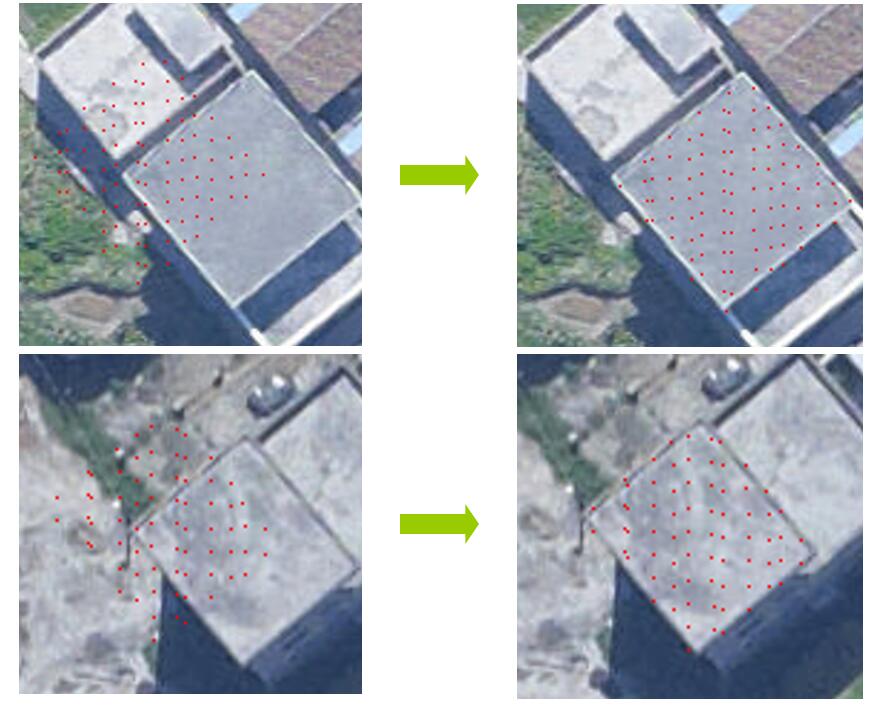
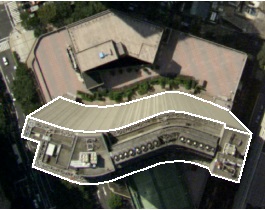
结合LiDAR点云和多视角航空影像的建筑物结构化模型重建理论与方法
2019.01 - 2022.12
国家自然科学基金 41871368
LiDAR点云与航空影像联合进行建筑物三维重建相比单一数据源的传统方法有突出优势。 本项目率先提出结合机载LiDAR点云和多视角航空影像的建筑物结构化模型重建理论与方法, 创造性地提出线框与三角网混合的矢量模型构建思想,基于线面特征互约束机制,利用点云精 确三维几何信息提取平面特征和影像丰富纹理信息提取直线特征,共同构建带有精细纹理且包 含建筑物角点间拓扑关系的结构化矢量模型。重点围绕基于线面特征的三维点云表面重建、基 于影像纹理识别的建筑物立面修复、保证纹理映射最优的两步法模型简化、线框与三角网混合 的建筑物矢量模型提取等核心问题展开系统深入的理论探索和算法研究,并研发基于机载LiDA R点云与多视角航空影像的建筑物结构化三维重建原型系统,验证相关理论和算法的正确性和 有效性。研究成果可为通用化矢量模型重建提供有效的解决方案,并为智能建筑、新型智慧城 市、城市三维数据库等应用奠定坚实的理论和技术基础。
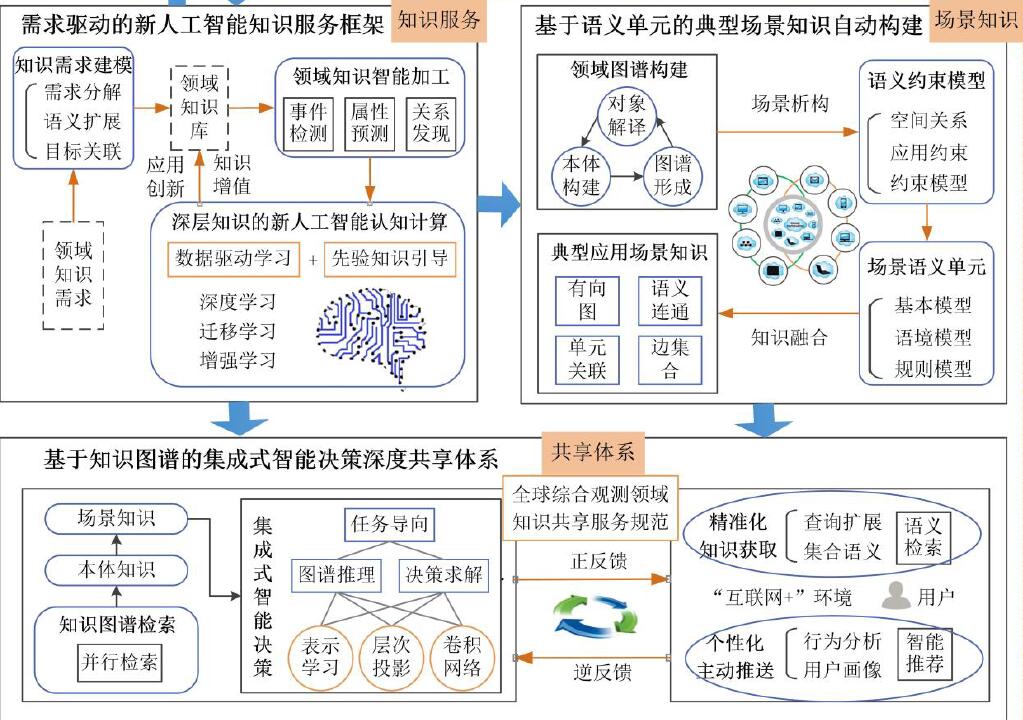
人工智能驱动的领域知识建模与深度共享服务
2018.05 - 2022.04
国家科技支撑计划 2018YFB0505003
针对我国现有遥感观测成果知识化建模和智能化知识服务能力较弱,未能为国家重大战略应用提供有力决策支持的现状,本项目将重点开展领域知识建模、深度共享与服务加速技术的研究,解决全球综合观测成果领域知识高可信知识建模、需求驱动的知识服务以及高效深度共享服务等问题。具体包括:研究遥感对象解译和“推理-验证”协同的领域知识本体迭代建模方法,设计和创建国土、海洋、测绘、气象和环境五大领域的本体知识库;研究需求驱动的智能知识服务框架,发展面向五大领域专业分析模型和人工智能分析模型的领域模型知识库;构建五大领域知识图谱和面向应用场景的语义单元,研究十大典型应用场景知识的自动化构建,结合领域本体和模型知识库共同形成“中国遥感应用智库”知识支撑;研究涵盖知识建模、推理与服务的多粒度计算服务加速方法技术,实现知识化服务全流程加速;研究知识图谱检索和基于图谱推理的场景决策方法,设计用户知识获取与推送反馈环路,构筑决策知识深度共享模式。
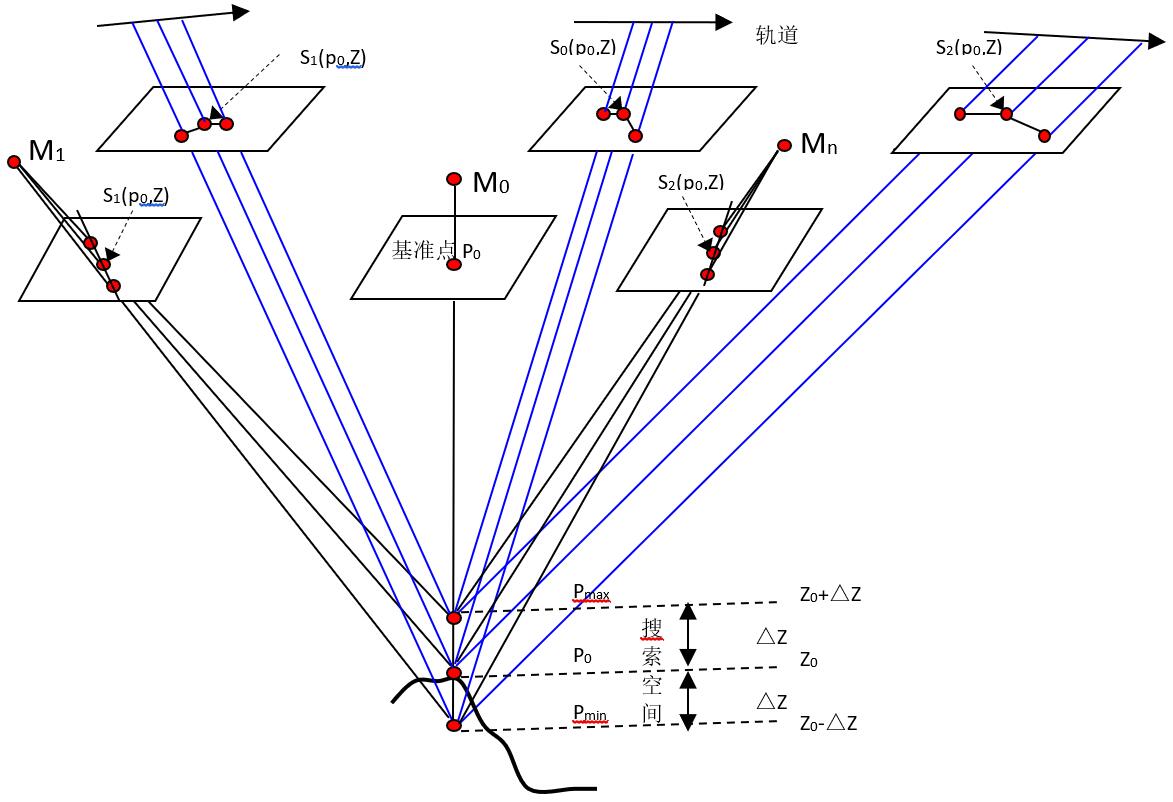
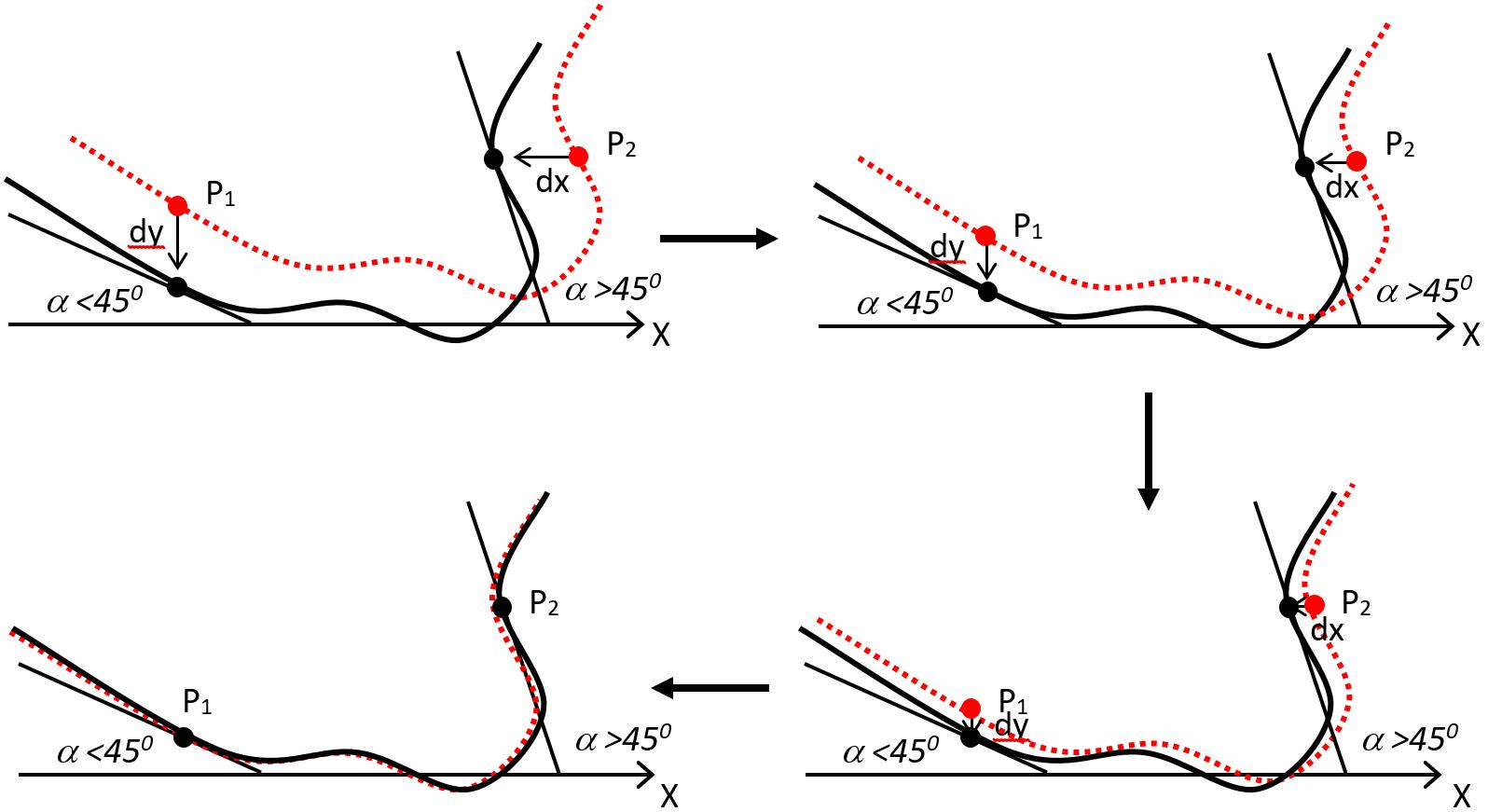
基于单立体模型的多视影像密集匹配理论与方法
2016.01 - 2019.12
国家自然科学基金 41571434
立体影像的密集匹配一直是摄影测量和计算机视觉领域经久不衰的研究热点,其核心是快速且稳健可靠的逐像素匹配理论与方法。提出基于代价矩阵和多重软约束的立体影像密集匹配理论与方法,改变了传统密集匹配算法的约束条件实现思路;率先提出结合基线长度、像平面法向量、交会角、空三匹配点等多重约束的最优立体像对自适应选择方法;提出基于全局能量函数最小化的物方多视点云融合方法;采用线缓冲区和赢家通吃思想实现线状地物影像边缘和深度图边缘的完全统一,并联合影像分割结果消除纹理贫乏区域的误匹配特征,提高密集匹配点云的精度水平;最终建立较为完整的多视影像多约束密集匹配理论和算法体系,实现卫星、航空、低空等传感器平台获取的多视立体影像的密集匹配,为高精度数字表面模型、真正射影像、建筑物三维重建等应用奠定坚实的理论和算法基础,同时为我国地理国情监测和智慧城市的发展提供技术支撑。

数字摄影测量与遥感
2014.01 - 2016.12
国家自然科学基金 41322010
国产中高分辨率遥感卫星由于受硬件技术水平和制造成本的制约,整体几何定位精度要远远落后于国外先进水平,因此迫切需要充分发挥已有多源地理空间信息及不同国产遥感卫星自身的优势,通过多卫星数据的联合处理同步提高各遥感卫星的对地定位精度。
本项目提出(1)基于区域分割约束的卫星影像匹配方法,利用标记分割区域作为匹配约束类型,并结合纹理与几何相似性,构建联合距离、夹角、灰度分布的相似性测度,提高了匹配传播的正确率与可靠性。(2)全新的基于公众地理信息和多轨数据的三线阵相机几何检校方法,控制点在已有正射影像及DEM上自动匹配,自动检校相机相对于卫星的三个旋转角及CCD在焦平面的安装误差,已成功应用于中国资源卫星应用中心资源三号卫星地面数据处理系统。(3)多源稀疏控制条件下国产遥感卫星的多星联合逆向定轨定姿理论与方法,无需任何地面控制的多星多条带影像联合处理后,全球定位精度提升到平面和高程均优于5m,稀少控制点平差后精度可达到平面1.3m、高程1.7m,极大地提升了国产遥感卫星的全球遥感制图能力。(4)SRTM高程数据辅助的超大范围卫星影像平面区域网平差方法,解决缺乏足够控制点时区域网平差结果不可靠的问题,使整个区域网都能达到较为均匀的物方精度和子像素级接边精度。(5)联合云检测与高通滤波的含云影像融合方法,实现了基于概率潜在语义分析与机器学习的面向对象云检测,并将云检测结果用于含云影像融合,有效地改善了融合产品的目视效果与各项质量指标。(6)提出基于标准色彩库的大范围遥感影像自动化匀光匀色方法,将待拼接影像与时相一致性最佳的标准色彩库影像按地理坐标进行重叠,以色彩库影像作为虚拟控制解算待拼接影像的色彩改正参数,生成匀光匀色后的大范围拼接影像。
研究成果已经应用于国产遥感卫星影像地理信息产品自动化生产,已完成多期高分一号和资源三号全国覆盖的2m分辨率正射产品生产,并且一直进行高分一号宽幅影像的准实时正射产品生产, 明显提升了国产遥感卫星影像的处理和应用水平。
基于多源数据联合平差的机载LiDAR点云精度优化
2012.01 - 2015.12
国家自然科学基金 41171292
机载LiDAR点云和航空影像的集成处理是近年来的研究热点,其核心为两类数据的高精度配准理论和方法。研究了机载LiDAR几何定位的严格模型,进行了LiDAR激光脚点尺寸的定量分析,提出地图投影坐标系下直接对地目标定位的长度变形近似改正方法,研究了国家坐标系下机载LiDAR数据的直接对地目标定位方法。实现了LiDAR点云和POS数据辅助的航空影像多视自动匹配及建筑物轮廓线提取与匹配;提出了城市地区机载LiDAR点云与航空影像的高精度配准方法,在机载LiDAR点云与区域网平差后的航空影像间匹配多种同名特征,以匹配的多种同名特征作为控制点进行LiDAR点云条带平差,改正点云条带系统误差,最终实现机载LiDAR点云与航空影像的高精度配准。研究了基于双边滤波和四叉树分割的改进半全局密集匹配 (SGM) 算法,以互信息作为代价函数,采用多维动态规划搜索策略使得全局能量函数取得最小,得到密集匹配的最优解。提出LiDAR点云辅助的半全局密集匹配进行高精度数字表面模型生成的方法,充分利用已有的LiDAR点云数据和高分辨率航空影像各自的优势,生成更加密集精细的三维点云,得到优于LiDAR点云数据和原始SGM的密集匹配结果。建立了较为完整的机载LiDAR点云与航空影像联合处理理论和算法体系,实现LiDAR点云与航空影像的联合平差及高精度配准,并进行了立体影像密集匹配与点云精度优化,可为高精度数字表面模型、真正射影像等应用及自主机载LiDAR系统的研制提供良好的技术支撑。
中低空自由飞行遥感影像智能处理系统
2011.01 - 2013.06
国家科技支撑计划 2011BAH12B05
本项目突破了无需任何初始信息的全自动航线恢复、大倾角非常规中低空遥感影像的智能匹配与联合区域网平差、中低空遥感影像的三维地形信息自动提取、大比例尺正射影像的匀光匀色与自动拼接等关键技术。独特采用多特征联合处理解决高可靠性匹配和困难条件下空中三角测量精度低及稳定性差等问题,完成地面移动处理平台系统的构建,并研发相应的软件处理系统。
首创性提出强化特征匹配、弱化先验信息,充分挖掘相邻影像间的内部重叠及影像名称顺序关系,集成灰度匹配与特征匹配、分级金字塔、匹配断裂像对智能连接、匹配粗差逐级剔除等全新技术,彻底解决了自由飞行模式(指事先不做严格航线规划的应急摄影模式)下克服任意旋转和重叠变化的中低空影像自动化匹配问题,同名点误匹配率降低到传统技术的1/4 以下;并结合基于广义点摄影测量的多特征匹配及空中三角测量技术,率先实现了无需任何初始位置姿态信息的中低空影像一键式智能处理核心技术。提出利用空中三角测量的思想解决中低空遥感影像的颜色问题,解决大比例尺正射影像的匀光匀色难题。
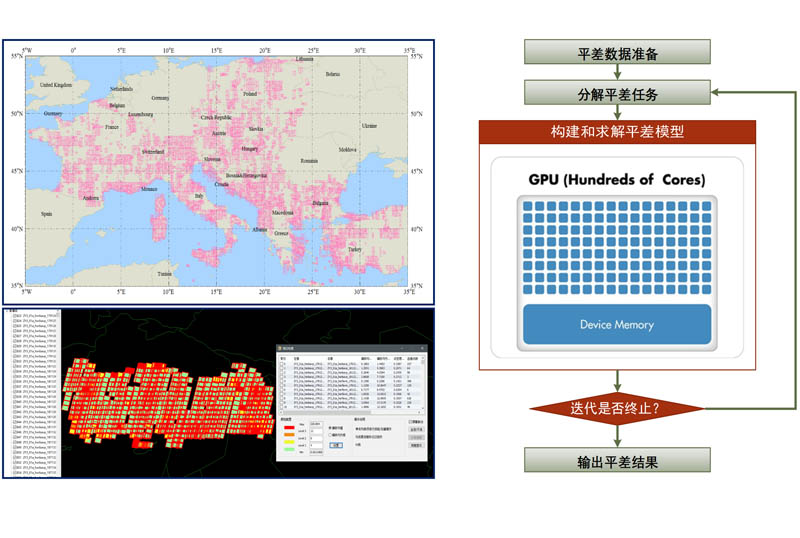
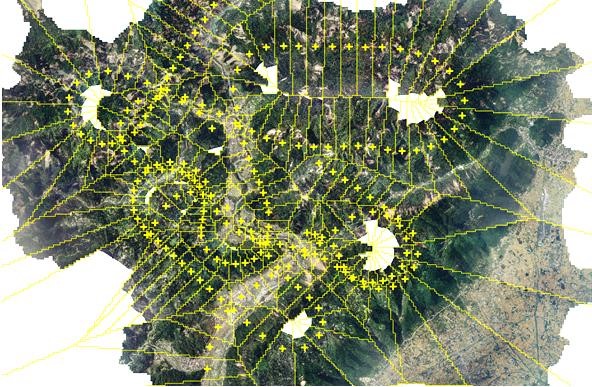
多源线阵、面阵光学影像的联合区域网空中三角测量
2011.01 - 2013.12
国家自然科学基金 41071233
多传感器光学影像数据的集成处理是摄影测量领域最重要的发展趋势之一,其核心为同名特征的高可靠性自动匹配与高精度区域网平差理论和方法。建立了多源数据联合处理的坐标基准及像地转换模型,提出在地心直角坐标系下进行不同传感器线阵、面阵光学影像数据的联合区域网平差,将不同传感器获取的具有共同重叠区域的所有影像数据纳入统一的摄影测量处理体系中;提出全球DEM 数据辅助的多源、多视光学影像高可靠性自动匹配方法,在多机多核两级并行处理机制下实现控制点全图匹配及多源光学影像的多视并行匹配;建立了海量多源光学影像联合区域网空中三角测量的理论模型和工程方法,完成多源面阵和线阵光学遥感影像联合区域网平差的数学模型、不同类观测值的自动定权方法及区域网平差的理论精度研究,实现了超大规模法方程系数矩阵的并行解算,并采用模拟和实际数据进行了理论验证和模型分析;实现了基于严格成像模型的大范围困难区域稀少甚至无控制点的条带式多轨联合区域网平差,在无任何地面控制资料的情况下取得了平面8米、高程5米的区域网平差精度,可为高精度和高可靠性的数字高程模型及正射影像等空间信息产品快速生产、复杂条件下大范围测图工程等应用提供技术保障。
遥感影像自动匹配
2007.01 - 2009.12
863计划 2006AA12Z136
以遥感影像的自动匹配理论和算法为研究重点,解决了航空、低空和非常规航空影像、卫星影像等的自动匹配;遥感影像与已有矢量图及正射影像的全自动匹配;POS辅助的高精度区域网平差;基于点线特征的密集匹配及正射影像制作等多个关键技术问题,影像匹配正确率及匹配效率较传统方法都有大幅度提高,提供了遥感影像自动匹配、区域网平差、数字高程模型及数字正射影像制作等一整套技术方法和实用软件系统。
在影像匹配的基础理论和算法、航空航天遥感影像自动匹配、高精度区域网平差、遥感影像与已有正射影像及已有矢量图的自动匹配等方面取得了突破性的创新研究成果,其中应急救灾和低空数码影像的自动匹配技术及影像与矢量图的自动配准技术均居国际一流水平,应急救灾航空影像的山区和城区匹配正确率均高达99%。结合最新研究的线特征匹配方法,城区影像的DSM密集匹配正确率大幅度提高,匹配算法的并行化处理效率较传统单机方法提高8倍以上。为海量遥感影像的快速处理提供了有效的技术手段,在突发灾害应急响应、国土资源调查、遥感测绘等领域具有很好的应用前景。
广义点摄影测量解算方法及其应用基础研究
2007.01 - 2009.12
国家自然科学基金 40671157
摄影测量理论的发展已经可以有效地进行基于物理点和物理直线的影像参数解算及三维信息提取;但是自然和人造物体中存在大量既不是由物理点、也不是由物理直线构成的各种复杂形状,对现有的理论和方法提出了新的挑战。
本项目提出将物理意义上的特征点扩展为数学意义上的广义点,以共线方程为基础建立广义点摄影测量模型,建立了统一的广义点摄影测量理论模型。广义点摄影测量的最大优势是不再要求物点和像点间的严格对应关系,只需同名特征间的整体对应关系即可,其严格对应关系在整体平差过程中逐步建立,是传统摄影测量理论的跨越式发展。深入研究了基于多种影像特征的相对定向、前(后)方交会及光束法平差等数学模型,提出并实现了基于多种影像特征的多视影像匹配,研究了面阵与线阵遥感影像的联合区域网平差理论和方法,实现了基于广义点摄影测量和模型导向的建筑物三维重建及激光点云和影像相结合的古文物三维重建。研究成果在多视影像匹配、数字影像图快速生产、数码城市建模、立体测图、三维信息获取等领域具有广泛的应用前景。

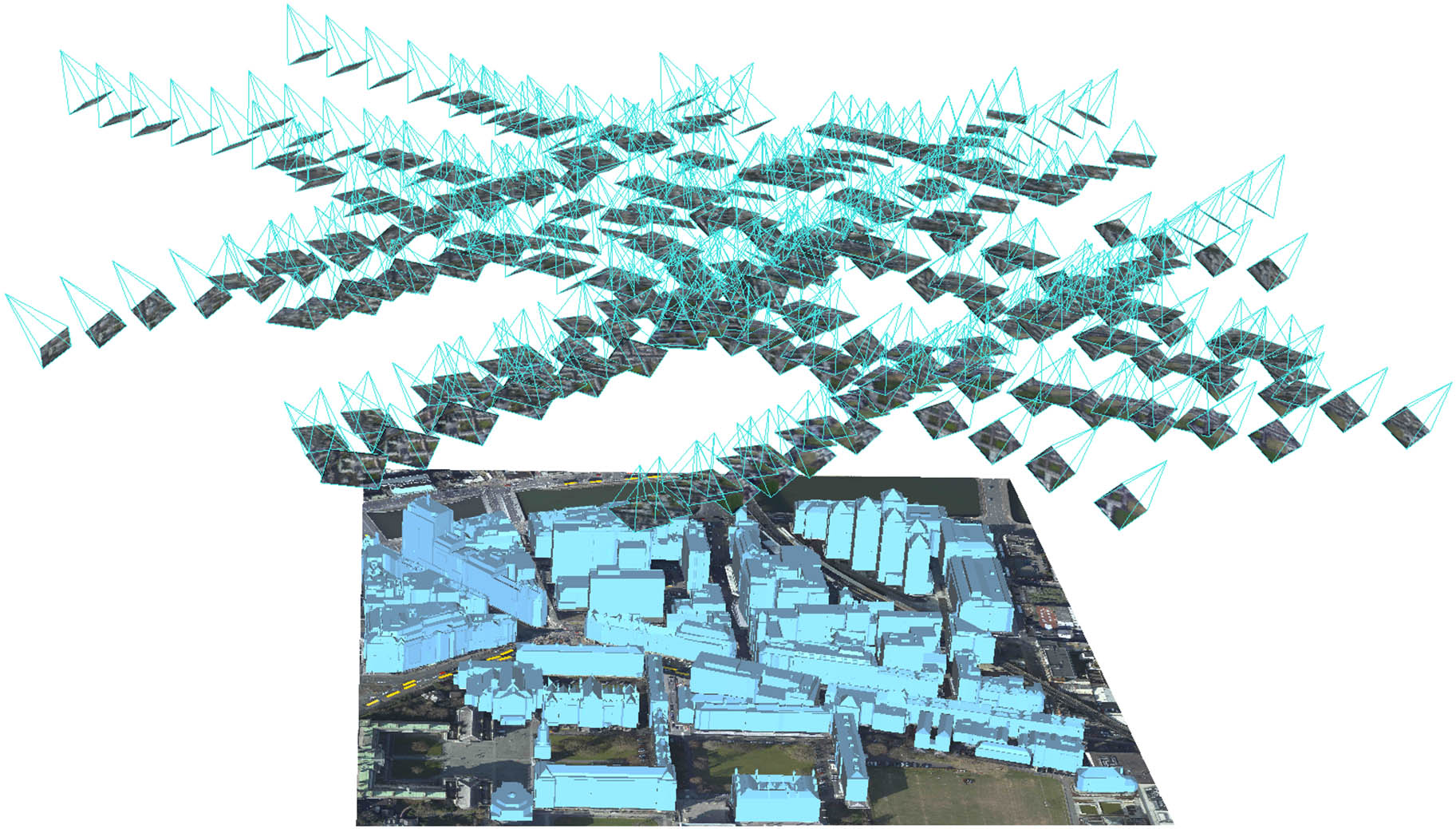
基于视频摄影测量的城市三维建模关键技术研究
2004.01 - 2006.12
国家自然科学基金 40301041
城市三维模型是数字城市及数字地球的重要组成部分,在汽车导航、旅游购物、建筑与城市规划、环境保护等方面有巨大的应用前景,受到国内外相关领域及政府部门的广泛关注。但由于理论和技术并未完全成熟,现阶段还主要依靠纯人工方式获取三维模型,如何大幅度地节约生产成本并提高生产效率是亟待解决的关键问题。以数字摄影测量和计算机视觉为理论基础,利用价格低廉的数字摄像机获取多条航带(包括地面摄影)的短基线、高重叠度序列影像,结合城市地区已有的数字地形图和LiDAR数据,率先采用基于序列图像的视频摄影测量技术和自动空中三角测量的可靠结果,以及序列图像的快速稳定匹配技术和点、线混合摄影测量理论进行快速三维重建,建立了自动获取建筑物等的三维模型并映射真实纹理、更新低精度的数字地图、自动提取DEM并生成正射影像的理论与试验系统,多次试验的结果说明试验系统的三维重建效率较传统的纯人工方式提高了8倍左右。本项技术的研究,不仅节约成本并大大提高生产效率,而且进一步丰富和发展了数字摄影测量的理论和方法,为三维城市模型以及数字城市的快速建立与广泛应用奠定坚实的基础,并促进数字摄影测量向全自动化方向发展。